

morgan.rossander@skogforsk.se
073 - 369 33 41


På senare tid har mekanisering av skogsplantering åter blivit ett ämne för forskning och utveckling. Ett sådant initiativ är samarbetsprojektet AutoPlant, där steg 2 nyligen avslutades i början av 2023 med försök under hösten 2022. I AutoPlant steg 2 togs ett antal viktiga delsystem fram som utgör basen för en autonom planteringsmaskin med fläckmarkberedning. Delsystemen integrerades på Luleå Tekniska Universitets 10 tons forskningsplattform med en fullstor skogskran.
En robot utför vanligen sina operationer i en sekvens, likt att följa ett recept. En autonom maskin behöver dock kunna utföra olika operationer beroende på resultaten av tidigare operationer eller oväntade händelser. En central aspekt av projektet AutoPlant var att bryta ner den komplexa uppgiften att bygga en autonom planteringsmaskin i hanterbara delar. Genom att dela upp projektet i olika delsystem kunde varje delsystem fokusera på ett eller flera specifika moment. Denna strategi underlättade utvecklingen av maskinen genom att göra det möjligt att ta itu med varje delprocess på ett systematiskt sätt, och att varje delsystem kunde utvecklas och testas separat innan de slutligen integrerades på plattformen.
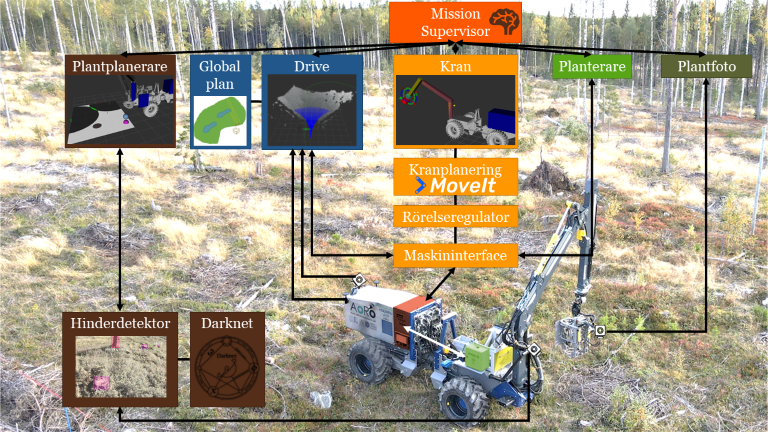
Figur 1. Autoplantkonceptet består av flera del- och undersystem. Mission Supervisor är överst i kontrollhierarkin och koordinerar delsystemen som utför sina uppgifter med hjälp av undersystem.
En helhetslösning nås genom att de olika delsystemen gör rätt moment vid rätt tillfälle. För den koordineringen har ett kommunikationsgränssnitt och en överordnad styrprogramvara kallad mission supervisor tagits fram. Vår mission supervisor bygger på principen finita tillståndsmaskiner, vilket här innebär att maskinens arbetsmoment representeras av olika tillstånd. Mission supervisor begär alltså i varje tillstånd ett visst delsystem att utföra en specifik uppgift. Tillstånden i sig har specifika övergångar som leder till nästa tillstånd, beroende på resultatet av det aktuella momentet. Exempelvis, om ett tillstånd är "plantera", kan utfallet vara "lyckad" eller "stenträff", vilket leder till helt olika beteenden hos maskinen.
Några fördelar med tillståndsmaskiner är att metoden är visuell och väletablerad samt att metodiken erbjuder utökning med fler tillstånd och övergångar på ett ordnat sätt. Det går även att gruppera delar av tillståndsmaskinen för att öka tydligheten och det finns verktyg för att underlätta implementering och övervakning. I AutoPlant har hela styrsystemet implementerats inom open-source-ramverket Robot Operating System (ROS) och koden är skriven i Python och C++. För själva mission supervisor har ett paket för tillståndsmaskiner i ROS och Python kallat SMACH använts.
Kranförflyttning stod i försöket för 70 % av maskintiden, vilket tydliggör betydelsen av att begränsa kranrörelser och optimera konceptet som helhet. Arbetet visade även att genom att bygga en enkel simuleringsmodell av maskinen kunde utvecklingen av styrkoden till stor del göras utan tillgång till den faktiska maskinen. Simuleringsmodellen utnyttjade inmätningar av maskinens fysiska egenskaper som även användes för att utveckla kranstyrningssystemet. Försöken visade god överenstämmelse mellan att köra hela systemet med simulerad maskin och den faktiska maskinen, vilket öppnar för vidare utveckling och utvärdering av algoritmval och studier med försök i kontrollerad simulerad miljö; vilket ofta är ett billigt och snabbt sätt att hitta design- och styrsystemlösningar utan att behöva kostsamma försök.

