morgan.rossander@skogforsk.se
073 - 369 33 41

Planereraren förbättrar möjligheten att köra skogsmaskiner autonomt jämfört med de beräkningsmetoder som endast ser till terrängen.
Examensarbetet, utfört av Alexander Axelsson och Matthew Källström Chittum vid KTH, ingår som en del i projektet Auto2. I arbetet har en funktion för styrning av autonoma skogsmaskiner utvecklats som tar hänsyn till terräng, maskin och förarkomfort samtidigt som den totala körsträckan minimeras.
Ruttplanering av en autonom terrängmaskin behandlas här som en trestegsprocess:
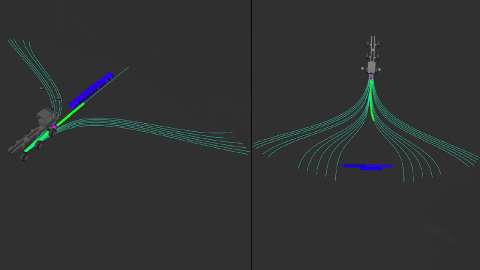
Lokala planerare för terrängkörning använder vanligtvis endast markstrukturen för att bedöma körbarhet. I detta arbete har även fordonets dynamik och rörelsemönster utnyttjats för att beräkna var maskinen ska köras i terrängen. Den utvecklade planeringsrutinen hittar den lokala rutten genom två steg. Det första steget är att hitta möjliga körvägar utifrån fordonskritiska parametrar i förhållande till terrängen och förplanerad körväg (lutning, markfrigång, avvikelse från planerad körväg). I det andra steget väljs ett av föreslagna alternativ i föregående steg med stöd av en optimeringsrutin där terräng, fordonsegenskaper och total körsträcka beaktas.
Examensarbetet har genom simuleringar visat att den utvecklade planeringsrutinen är effektiv och kan leda till att smartare rutter öppnas upp för den autonoma maskinen jämfört med konventionella planeringsrutiner.
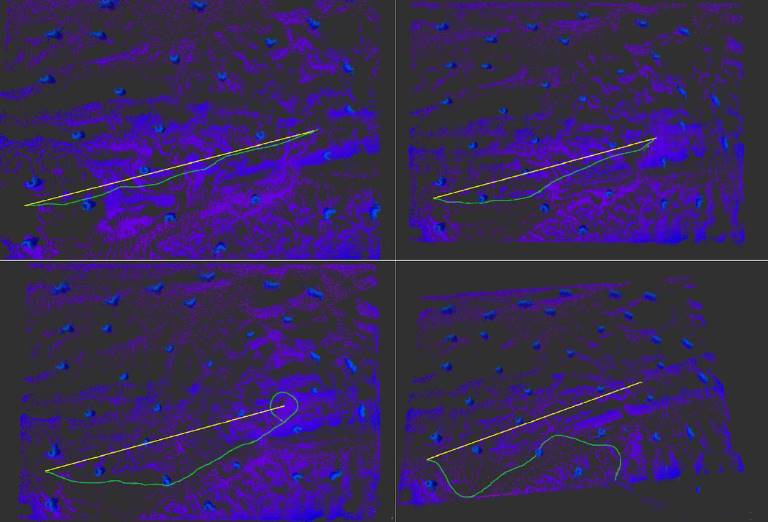
Arbetet visar att främst lutning och aggressiviteten i lutningens variation har störst påverkan på val av körväg. Bilden nedan visar den globala planen (gul linje) och hur den lokala planen (grön linje) successivt förändras då beräkningsmetoden tvingas ta större hänsyn till lutningsmåtten.
Den presenterade planeraren ser lovande ut för framtida praktisk implementering och kan tillämpas på alla terrängfordon. Tillämpning kräver god modellering av fordonet i fråga samt robust och detaljerad kartläggning. För intrimning av planeringsalgoritmen behövs en simulerad miljö.
För mer information, läs examensarbetet i sin helhet.