


hoey.alexander@gmail.com
Självständig rörelseplanering för robotarm i slyröjningsapplikation
Kan framtidens röjning ske med röjningsrobotar? Ett examensarbete gjort på Örebro universitet har studerat hur rörelseplanering för en robotarm med ett tänkt röjverktyg kan se ut.
Rörelseplanering innebär att en dator beräknar hur en robot ska röra sig för att utföra en uppgift utan att kollidera med sig själv eller med sin omgivning. Den här tekniken kan användas på kranarmar för att automatisera delar eller hela uppdrag.
Att styra en kran kan vara mentalt påfrestande då varje led ofta behöver manövreras individuellt. En lösning som finns på vissa skogsmaskiner idag är kranspetsstyrning. I sådana maskiner är spakarnas leder kopplade till en fysisk rörelse hos kranspetsen istället. Även om detta minskar den mentala belastningen för föraren, så behöver föraren fortfarande ha direkt kontroll på hur kranarmen ska röra sig.
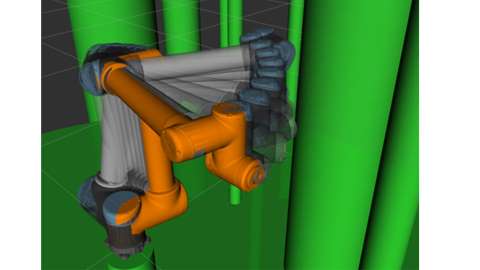
Med hjälp av rörelseplanering kan en dator självständigt beräkna hur en robotarm ska röra sig samtidigt som den tar hänsyn till sin omgivning och undviker kollisioner. I det här examensarbetet har rörelseplanering för en robotarm med ett tänkt röjverktyg studerats. Med hjälp av simulering har armen programmerats att röra sig mot utvalda stammar samtidigt som den undvikit sig själv och andra stammar. Fordonet på vilken armen är tänkt att sitta har ej studerats.
Datorn som sköter rörelseplaneringen av armen behöver en 3D-representation av hinder i omgivningen och återkoppling av kranens och maskinens leder. Kända hinder som maskindelar kan modelleras in på förhand. För att kunna hantera externa hinder såsom träd krävs någon form av sensorsystem och algoritmer för att omvandla sensordata till 3D-objekt som planeraren kan hantera. I exjobbet har enkla cylindrar fått representera trädstammar i simuleringarna. En stor fördel med att arbeta med simuleringar är att algoritmer och koncept kan utvecklas med givna förutsättningar utan omfattande försöksuppställningar. Dessutom kan komplicerade kringproblem som sensorsystem ignoreras för att fokusera på möjligheterna med konceptet.
Vid simulering lyckades datorn ofta ta fram en godkänd rörelseplan, om inget hinder gjorde planeringen omöjlig. I de flesta fallen gjorde datorn det på några sekunder. Eftersom datorns rörelseplanerare arbetar slumpmässigt var det inte ovanligt att robotarmen gjorde en oväntad och omständig rörelse för att ta sig till målet. En nackdel som följer av att datorn arbetar slumpmässigt är att det inte säkert går att säga om datorn kommer att lyckas hitta en rörelseplan. Alternativa planeringsmetoder som inte är slumpmässiga existerar dock men har inte ännu prövats i det här sammanhanget.
Klassiska robotarmar, med sina stela och välkontrollerade rörelser, har etablerade lösningar för planering och styrning. I autonoma operationer med lite kortare räckvidd skulle de kunna utgöra en bra ersättare till den traditionella hydraulikkranen. Det i exjobbet tänkta fallet med röjningsrobotar är en möjlig sådan applikation.
Exjobbet väcker även andra tankar om hur hydraulikkranar skulle kunna behandlas som robotarmar. En uppenbar utmaning är att även om hydraulikkranarna är relativt styva kan visst flex förekomma på långa armar. En möjlig tillämpning är att en löst hängande gripklo eller skördaraggregat kan användas. Men hur dessa ska tillämpas i planeringsalgoritmer är fråga för fortsatta studier. Även skogskranens teleskopsarm är en unik funktion jämfört med de flesta vanliga robotarmskonstruktioner.
Nr 2021-9
Publicerad 2021-03-01 11:01
Kommentarer
Det finns ännu inga kommentarer på denna sida. Var först med att ge en kommmentar.
Kommentera
Tyvärr lyckades vi inte spara din kommentar. Var god bekräfta att du inte är en robot!
Skicka in
Kommentarer granskas innan publicering
Tack för din kommentar!
Vi granskar och publicerar din kommentar så snart som möjligt.
Vi granskar och publicerar din kommentar så snart som möjligt.
Författare

Alexander Hoey
Olle Gelin
Tidigare anställd