Bakgrund
Traditionellt är det skogstransporterna på bilväg som har varit i fokus för optimering, men näringens stärkta fokus på produktivitet har tillsammans med tillgång till GPS och laserdata gett nya öppningar för hur skogsbruket kan åstadkomma transportförbättringar även i drivningsarbetet.
Samtidigt har en annan fråga uppmärksammats i skogsbruket de senaste åren och blivit till en av de viktigaste. Det handlar om den påverkan som skogsbruket gör på mark och vatten. Att undvika körskador är något som hela branschen jobbar med, bland annat genom en branschgemensam markskadepolicy (Berg m.fl. 2010).
Skogforsks projekt STIG (Skoglig Terrängplanering I GIS) har under de senaste åren drivit på användandet av markfuktighetskartor för att förebygga skador på mark och vatten. Dessa dataunderlag har visat sig fungera mycket bra och intresset har varit stort hos många verksamma i skogsbranschen.
Parallellt med STIG har Skogforsk påbörjat ett projekt med namnet BesT WAY (Beslutstöd Traktplanering), där en optimering av drivningsarbetet testas med digitala kartskikt, bland annat markfuktighetskartor. Målet är att göra traktplaneringen bättre för att effektivisera drivningsarbetet, d.v.s både minska körsträcka och minska kostnaden och minska körskadorna.
I denna studie (ett examensarbete vid Jägmästarlinjen, SLU) kombineras de båda projekten, avverkningsplaneringen förenklas och förbättras. Maskinförarnas traktdirektiv blir tydligare samtidigt som möjligheter att effektivisera drivningen kan identifieras redan innan arbetet påbörjas.
Genomförande
Studien genomfördes som en digital rekonstruktion av två redan avverkade slutavverkningstrakter i Västergötland.
Trakt 1 var belägen i närheten av Vårgårda. Den var inte kuperad och en skogsbilväg tangerade traktens östra sida. Längs denna har avläggen placerats.
Trakt 2 var belägen i närheten av Lilla Edet. Trakten var mycket kuperad och en skogsbilväg, längs vilken avläggen placerades, klöv trakten. Ett större hänsynsområde fanns i mitten av trakten. Där utfördes ingen avverkning.
Genom GPS-registreringar och avverkningsmaskinernas uppföljningsfiler kunde information om drivningarnas körsträckor, lastvolymer och virkeshögars placeringar erhållas. Denna data användes som underlag för optimerade skotningsscenarier.
Digitala traktmodeller
Digitala modeller över trakterna upprättades, med data om markens struktur, höjdskillnader och lutning. På den placerades sedan skördarens virkeshögar ut, med hjälp av koordinaterna från uppföljningsfilerna. Detta utgjorde virkesfördelningen på trakten för denna studie. Vid framtida planering är dock tanken att virkesvolymen och dess fördelning över trakten ska tas direkt från laserskannad information eller andra källor. Även en markfuktighetskarta utgjorde ett skikt i den digitala modellen.
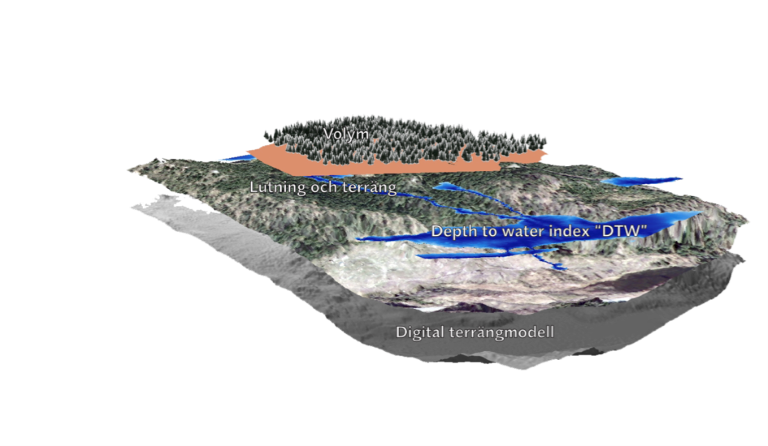
Figur 1. De olika digitala skikt som användes för att rekonstruera de två studietrakterna. Digital terrängmodell, markfuktighetskarta (DTW), lutning samt virkesvolym och annan information från fältinsamling.
Angav viktiga positioner
Nästa steg var att skapa några alternativ för placering av avlägg och överfarter över bäckar och andra känsliga områden.
Placeringen av dessa i terrängen är inte särskilt flexibel och skotarföraren har inte så stora möjligheter att förändra placeringen när den väl gjorts. Däremot finns det ofta några alternativa ställen för placering av såväl avläggen som överfarterna.
Genom att använda olika alternativ och sedan optimera alternativen, kunde det bästa alternativet urskiljas och sedan jämföras med nyckeltal från den verkliga avverkningen och identifiera skillnaden.
För att kunna jämföra den verkliga skotningen med de optimerade förslagen upprättades fyra scenarier för drivningen benämnda A,B,C och D.
Scenariernas nyckeltal
Nyckeltal för de olika scenarierna:
- Total sträcka = den totalt körda sträckan för att frakta ut all volym till avlägg.
- Medelskotningsavstånd = nyckeltalet uppskattades på två olika sätt, dels som ett enkelt medelvärde för körd sträcka för varje lass (både tom och lastad körning). Men också som ett normerat medelvärde där skotarens lastvolym beaktades. Detta berodde på att trakterna hade olika indata gällande antalet körda lass.
- Tidsåtgång = beräknad tidsåtgång med tre olika medelvärden för skotarens körhastighet.
- Uppskattad kostnad = kostnad uppskattad efter de olika körhastigheterna.
Scenarierna hade olika förutsättningar gällande placering av avlägg och överfarter och ett av scenarierna representerade den verkliga skotningen, med nyckeltalen hämtade från den.
Det sista scenariot justerades dessutom så att optimeringen endast fick använda den verkliga avverkningens körvägar och inte föreslå egna körvägar.
Scenario A-D
Beskrivning av scenarierna:
A. Det scenario där värdena hämtats från den verkliga skotningen. Användes som jämförelsevärde för att bedöma huruvida optimeringen var bättre eller sämre än den verkliga skotningen.
B. Optimerad skotning med samma förutsättningar som den verkliga skotningen. Avlägg och överfarter var således placerade på samma sätt som vid den verkliga skotningen.
C. Optimerad skotning med alternativa placeringar av avlägg och överfarter.
D. Alternativ där optimeringen använde den verkliga skotarens körvägar och inte fick göra egna körvägar på trakten. Har således samma körvägsmönster som den verkliga skotningen.
Resultat
För de båda trakterna blev körvägarna för de två trakterna enligt bilden nedan. Det syns tydligt att de optimerade scenarierna hade färre körvägar än vad den verkliga skotningen hade. Trakten till vänster benämns ”trakt 1” och trakten till höger som ”trakt 2” i efterföljande text.
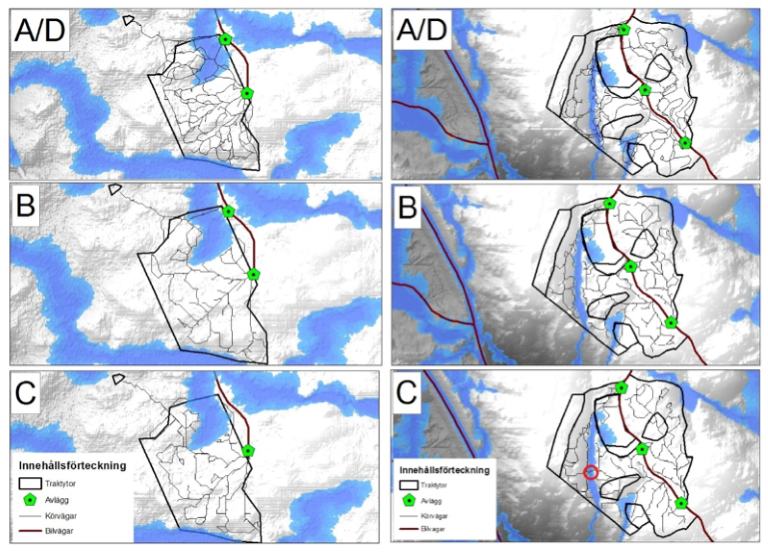
Figur 2. Trakt 1 till vänster och trakt 2 till höger. De optimerade alternativen B och C kan tydligt ses ha färre körvägar än den verkliga skotningen A. Detta beror på att optimeringen lägger ut sitt vägnät optimalt först så att allt virke kan nås och sedan optimerar ruttkörningen som skotaren gör på för att hämta in virket.
Optimering gav resultat
Körsträckan kortades i genomsnitt för samtliga scenarier på båda trakterna med drygt 20 % mot det verkliga utförandets sträcka. Detta indikerar att det finns potential i att låta ett optimeringsverktyg ge förslag för hur vägdragningen skall ske på en avverkningstrakt.
Mixade eller sortimentsrena lass?
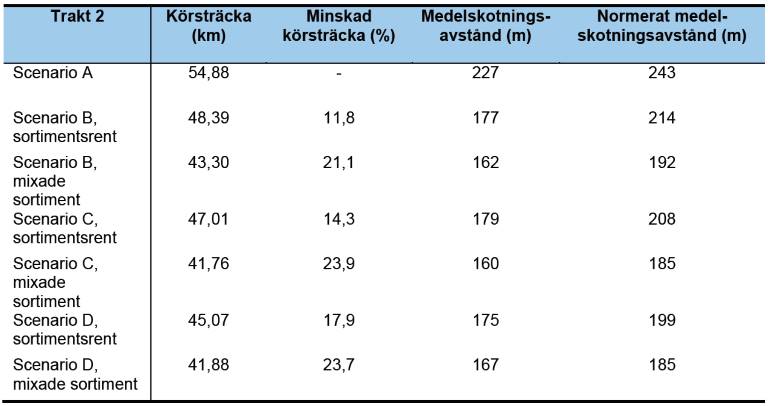
En parameter som gör stor påverkan på utfallet av optimeringen är huruvida skotarna har ett enda sortiment i sina lass eller kör med mixade sortiment. Då detta är svårt att uppskatta med säkerhet valdes två olika varianter i studien. Antingen fick skotaren ha flera sortiment i lasset eller så tilläts inte detta. Därav presenteras samtliga siffror med dessa båda varianter. Tabellerna nedan visar nyckeltalen för de två trakternas olika scenarier.
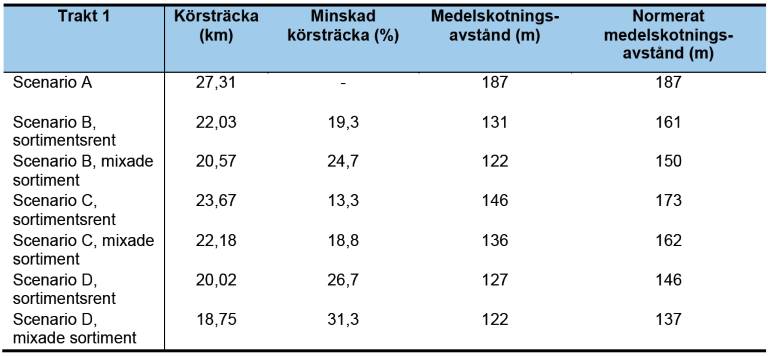
Tabell tre visar hur körsträckan och de två medelskotningsavstånden förhöll sig för de olika scenarierna på trakt 1. Likaså kan man i kolumn två läsa ut hur många procent som optimeringarnas totala körsträcka förändras jämfört med den verkliga skotningen (Scenario A).
Tabell 3. Värden för trakt 1. Nyckeltalen total körsträcka, medelskotningsavstånd och normerat medelskotningsavstånd kan utläsas i tabellen, likaså kan den totala körsträckans förändring mellan optimeringarna och den verkliga skotningen utläsas i kolumn två ”minskad körsträcka”.
Tabell 4. I tabellen går det att utläsa hur lång körtid som går åt för att driva trakt 1. Det är endast den effektiva körtiden som skrivs ut i tabellen, tid för lastning och avlastning ingår inte. Körtiden är beräknad med tre olika medelhastigheter där den mellersta hastigheten är den verkliga skotarens medelhastighet.
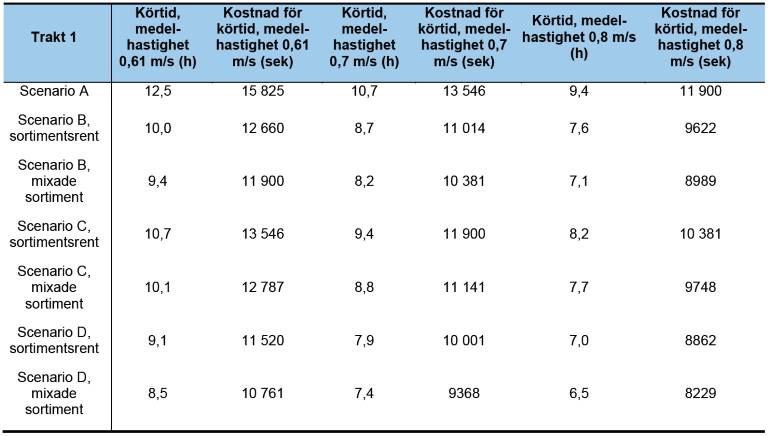
Vidare visar Tabell 4 hur körtid och kostnad skiljde sig mellan de olika scenarierna på trakt 1. Kostnaden är beräknad på körtiden och körtiden är direkt beroende av sträckan vilket innebär att den procentuella skillnaden mellan scenarierna är densamma som visas i Tabell 3 i kolumnen för hur körsträckan skiljer sig åt. Tid och kostnad har beräknats med tre olika medelhastigheter för att ge en förståelse över hur körhastigheten påverkar utfallet.
Tabell 5. Värden för trakt 2. Nyckeltalen total körsträcka, medelskotningsavstånd och normerat medelskotningsavstånd kan utläsas i tabellen, likaså kan den totala körsträckans förändring mellan optimeringarna och den verkliga skotningen utläsas i kolumn två: ”minskad körsträcka”.
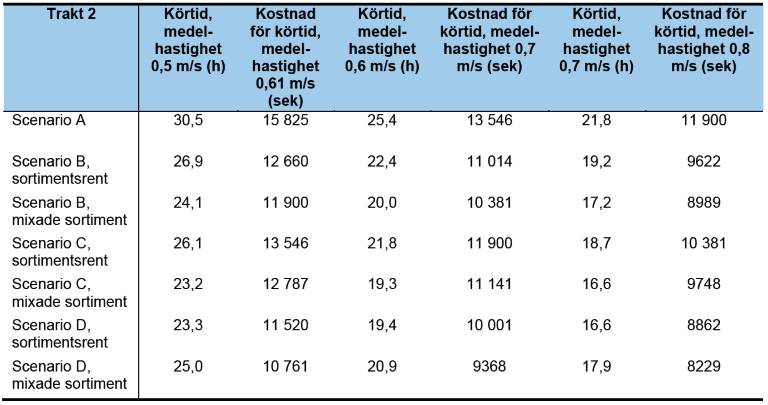
Tabell 6 visar hur körtid och kostnad skiljde sig mellan de olika scenarierna på trakt 2. Kostnaden är beräknad på körtiden och körtiden är direkt beroende av sträckan, vilket innebär att den procentuella skillnaden mellan scenarierna är den samma som visas i Tabell 5 i kolumnen för hur körsträckan skiljer sig åt. Tid och kostnad har beräknats med tre olika medelhastigheter för att ge en förståelse över hur körhastigheten påverkar utfallet.
Diskussion
Genom att jämföra de olika scenarierna kan man dra flera olika slutsatser om både optimeringens funktionalitet och dess resultatet.
Verklig kontra optimerad skotning
Genom att jämföra scenario A med scenario B jämförs det verkliga utförandet med optimeringens resultat under de verkliga förutsättningarna. Enligt analysen finns då en potential att minska körsträckan med 19 % (ett genomsnittsvärde för båda trakterna och ett medelvärde av sortimentsren och mixad skotning) genom att optimera körningen under samma förutsättningar som vid den verkliga drivningen gällande antal avlägg och överfarter och deras placering.
Alternativa drivningssätt
Genom optimering går det också att simulera alternativa drivningssätt med avseende på avläggens och överfarternas placering. Då finns möjligheten att vid en valsituation få ett beslutstöd med jämförbara nyckeltal över hur de olika alternativen påverkar drivningsresultatet.
Scenario C fick här utgöra det alternativa drivningssättet och jämfördes med scenario A. För trakt 1 kunde skotningssträckan reduceras med 16 %. För trakt två var reduktionen 19 %. Detta är medelvärden av sortimentsren och blandad skotning.
Ett orealistiskt alternativ
För scenario D har en del av optimeringen exkluderas. Optimeringen jobbar normalt sett i två steg. Först placerar den ut ett optimalt vägnät som skördaren ska använda och sedan ruttoptimeras skotarens arbete på detta körvägsnät.
För scenario D användes endast ruttoptimeringen och vägarna från den verkliga skotarens GPS användes som körvägsnät. När detta gjordes var hypotesen att ruttoptimeringens överensstämmande med verkligheten skulle kunna mätas. Men detta scenario gav den kortaste körsträckan av alla scenarier, vilket inte alls stämde med det verkliga skotningsarbetet som ju gav längst körsträcka av scenarierna.
Förklaringen är att den verkliga skotningens körvägsnät som var mycket omfattande gav alltför stora möjligheter för optimeringen att välja effektiva vägar - även vägar som från första början egentligen inte kunnat användas då virke från avverkningen ligger i vägen, alternativt att skogen där inte avverkats än. Optimeringen tar inte hänsyn till om sådana hinder finns framför skotaren. Detta får till följd att ett orealistiskt körvägsmönster använts vid scenario D.
Mycket stor potential
Det är viktigt att understryka att dessa resultat i studien inte går att direkt översätta till svenskt skogsbruk överlag, utan siffrorna gäller dessa två specifika trakter. Men förbättringsmarginalerna är stora med ett genomsnitt kring hela 20 procent. Vid normala utvecklingssteg i skogsbruket talar man ofta om förbättringar med någon eller några procentenheter. Tidigare studier av skotningsoptimering i det s.k. SPORRE-projektet visar på potentialer på ca 10 %.
Minskar belastningen
Även hälften av den uppmätta förbättringen skulle utgöra en mycket stor effektivisering, men den ger inte bara en effektivare och potentiellt mindre kostsam avverkning utan reducerar också belastningen på marken med lika många procentenheter.
Körning som koncentreras till färre och större körvägar gör att mera arbete kan läggas på förstärkning av dessa vägar. Utöver detta ser optimeringen till att placeringen av körvägarna görs efter kända markförhållanden som fuktighet och andra hänsynsområden samt forn- och kulturlämningar, vilket ytterligare bidrar till ett skonsammare skogsbruk.
Bör utvärderas vidare
Denna studie visar att potentialen finns att göra effektivare och skonsammare traktplaneringar med hjälp av digitala terrängmodeller och optimeringar enligt BestWay-modellen. Skogforsk fortsätter utvärdera hur BestWays optimerade drivningsförslag fungerar i praktiken och hur beslutsstödet kan implementeras i praktiskt planerings- och drivningsarbete.
Läs exjobbet i sin helhet
